Research Focus
FlexRay, CAN, CAN-FD networks. Message schedule design, gateway unit design and implementation. Integrated, heterogenous communication architectures for ITS.
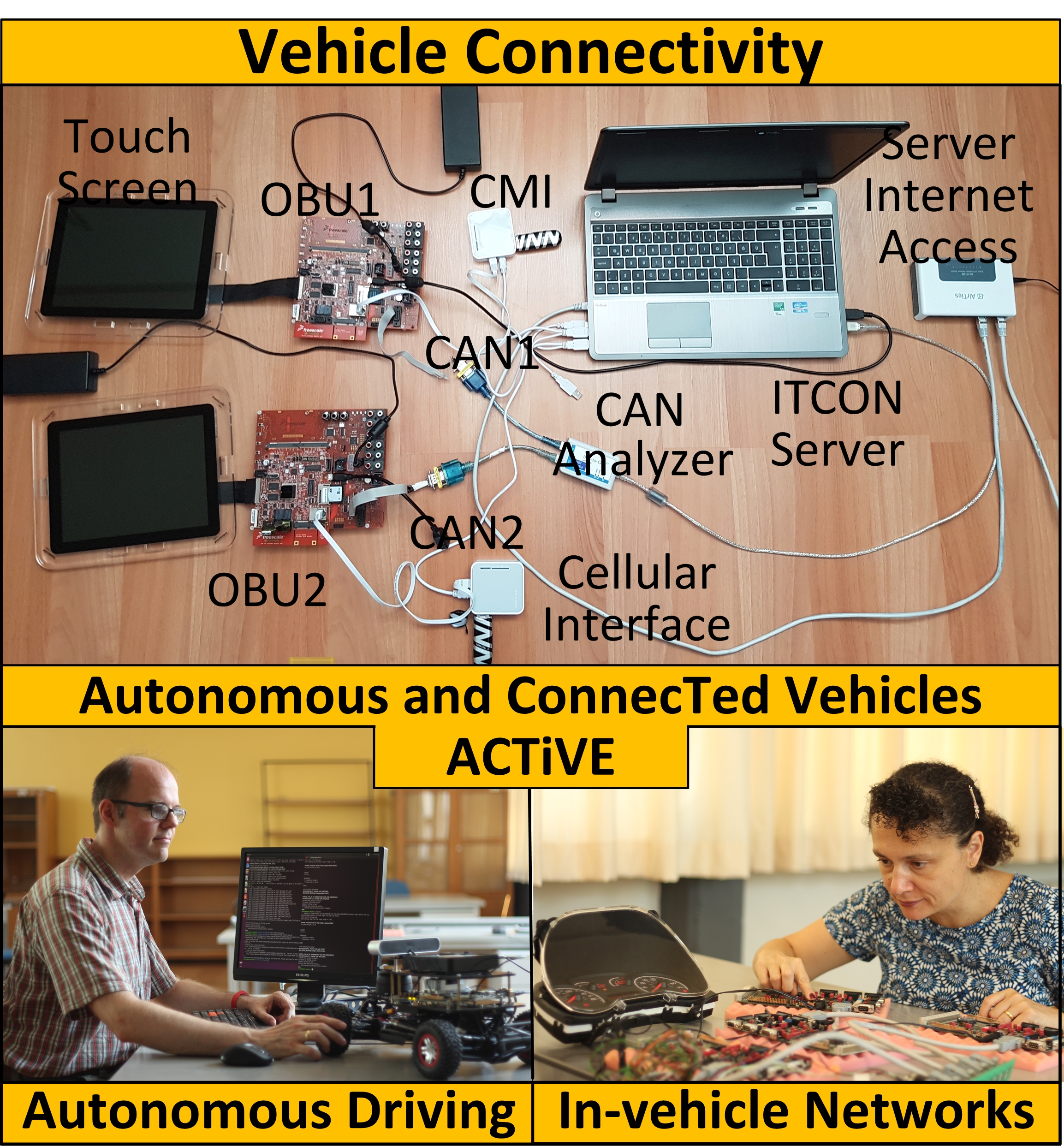
Vehicle Connectivity
End-to-end networking for vehicles in the scope of Intelligent Transportation Systems using V2V and V2I communication.
Autonomous Vehicles
Longitudinal and lateral control methods for cooperative and coordinated autonomous driving.
People
Prof. Dr. Ece Guran Schmidt

2004: Ph.D. in Electrical
and Computer Engineering, Carnegie Mellon
University, Pittsburgh, USA.
Thesis Title:
“Scheduling and Switching Architecture for Virtual
Synchronous Frame (VSF)”
2001: M.Sc. in
Electrical and Computer Engineering, Carnegie Mellon
University, Pittsburgh, USA.
Thesis Title: “A
Novel Scalable Packet Switch Architecture with
Quality of Service Support"
1997: B.Sc. in Electrical and
Electronics Engineering, Middle East Technical
University, Ankara, Turkey.
1993: High School
Diploma: Ankara Atatürk Anadolu Lisesi (AAAL),
7-year program.
Prof. Dr. Klaus Werner Schmidt

2005: Ph.D. in Electrical
and Electronic and Communication Engineering, University of Erlangen-Nuremberg, Germany.
Thesis Title:
“Hierarchical Control of Decentralized Discrete Event Systems - Theory and Application”
2002: Diploma in Electrical, Electronic and Communication Engineering, University of Erlangen-Nuremberg,Germany.
Thesis Title: “Synthesis of State Feedback for linear discrete Systems over GF(2) by means of the Polynomial Matrix Method"
1996: Abitur: Schillergymnasium Hof.
Projects
In-Vehicle and Embedded Networks
In Progress:
- CANDS: A Novel Framework for the Deterministic, Real-Time, Reliable and Cost-Efficient In-Vehicle Communication of Automotive Cyber Physical Systems, TÜBITAK 1001 Project Summary
Completed:
- Industrial Project conducted with Odelo : “Software and Hardware Development for the Software Test of Vehicle Tail Lights”, researcher, Project end date: 2019.
- Industrial Project conducted with ROKETSAN (SAYP): “MOKA (Model Kullanım Altyapısı)-Model-based Embedded Software Development”, researcher, Project end date: 2018.
- METU Research Project: “Araç içi Haberleşme için CAN-FD Kontrolcusu (METU-CAN): FPGA Geliştirimi, Gerçekleştirimi ve Testleri – A CAN-FD Controller (METU-CAN) for In-vehicle Communication: FPGA Development, Implementation and Evaluation”, principal investigator, Project end date: December 2017.
- Industrial Project conducted with TOFAS and Cankaya University (supported by TUBITAK): “Otomotiv Haberleşme Ağları için Algoritmik Çizelgelendirme Yapabilen Tasarım Yazılımı Geliştirme (AUTONET)-AUTONET: A software design tool for algorithmic scheduling of automotive networks”, principal invesigator, Project end date: April 2015.
- TUBITAK Carrier Award Project: “Ethernet üzerinde dinamik, dağıtılmış ve güvenilir endüstriyel haberleşme protokolları: Genel tasarım işçerçevesi, gerçekleştirim ve deneysel çalışma-Dynamic, distributed and dependable real-time industrial communication protocols over Ethernet: General design framework, implementation and experimental study”, principal invesigator, Project end date: March 2013. A video of the experiments can be seen at this link.
- Industrial Project conducted with TOFAS: “Diagnoser
Interface Development for Electric Vehicle”,
principal invesigator, Project end date: September
2011.
- METU Research Project: “Endüstriyel ağ
uygulamaları için paylaşımlı ortamda haberleşme
protokolu geliştirilmesi-Development of a
communication protocol in shared medium for
industrial networking applications ”, principal
invesigator, Project end date: May 2010.
- Industrial Projectconducted with TOFAS: “Otomatik park etme ve drive-by-wire uygulamaları için TOFAŞ araçlarında drive-by-wire haberleşme alt yapısının FlexRay veriyolu üzerinden kurulması-Establishing the drive-by-wire communication infrastructure over FlexRay Bus in TOFAS vehicles for automatic parking and drive-by-wire applications”, principal invesigator, Project end date: March 2010. A video of the experiments can be seen at this link.
- METU Research Project: “FlexRay Araç içi haberleşme sistemleri için yüksek başarimli zaman çizelgeleyicisi tasarımı ve gerçekleştirimi-Design and implementation of high performance schedules for FlexRay in-vehicle communication networks ”, principal invesigator, Project end date: December 2008.
- METU Research Project: “Yüksek hızlı araç içi haberleşme sistemleri için yüksek başarımlı zaman çizelgeleyicisi gerçekleştirimi-Implementation of high-performance schedules for high-speed in-vehicle communication networks”, principal invesigator, Project end date: December 2007.
Vehicle Connectivity
Completed:
- Industrial Project conducted with TURK
TRAKTOR: “Connected Tractor”: Yeni Nesil
Traktörler içinAraç-içi ve Araç-X (V2X)
Haberleşme Mimarisi Geliştirilmesi Ar-Ge Projesi-
Connected Tractor”: Development of in-vehicle and V2X network architecture for next generetaion tractors", principal invesigator, Project end date: June 2017. - METU Research Project: “Akıllı Ulaşım Sistemleri (AUS) için gerçek zamanlı bir haberleşme mimarisi – A real time communication architecture for Intelligent Transportation Systems (ITS)”, principal invesigator, Project end date: December 2016. Official completion: February 2017.
-
Development of a Body Control Module that can be implemented for next generation tractors”, principal invesigator, Project end date: August 2016. -
- Industrial Project conducted with TOFAS and Cankaya University (supported by TUBITAK): “Otomotiv Haberleşme Ağları için Algoritmik Çizelgelendirme Yapabilen Tasarım Yazılımı Geliştirme (AUTONET)-AUTONET: A software design tool for algorithmic scheduling of automotive networks”, principal invesigator, Project end date: April 2015.
Autonomous Vehicles
In Progress:
- Industrial Project conducted with HIDROMEK : “Electronic Control System Design, Realization and Validation for Advanced Construction Vehicles”, researcher, Project end date: 2020.
Completed:
- An Intelligent Transportation Systems Framework for Traffic Safety and Traffic Efficiency: Coordinated Longitudinal and Lateral Maneuvers of Heterogeneous Autonomous Vehicles on Multi-lane Highways, TÜBITAK 1001
- METU Research Project: Lane Detection and Lane Keeping Control: Algorithm Development, Prototype Implementation and Evaluation.
Papers
In-Vehicle and Embedded Networks
International Journal:
- Y. B. Kartal, E. G. Schmidt, and Klaus Werner Schmidt “Modeling Distributed Real-time Systems in TIOA and UPPAAL", vol 16, no. 1 ACM Transactions on Embedded Computing Systems, 2016.
- K. W. Schmidt, B. Alkan, E. G. Schmidt, D. C. Karani, U. Karakaya, “Controller Area Network (CAN) With Priority Queues and FIFO Queues: Improved Schedulability Analysis and Message Set Extension," International Journal of Vehicle Design, vol. 71, no. 1/2/3/4, 2016.
- K. W. Schmidt and E. G. Schmidt, “Distributed Real-time Protocols for Industrial Control Systems: Framework and Examples,” IEEE Transactions on Parallel and Distributed Systems, vol. 23, no.10, pp. 1856-1866, 2012.
- S. Senol, K. Leblebicioglu and E. G. Schmidt, “ INtERCEDE: An Algorithmic Approach to Networked Control System Design,” Elsevier Journal of Network and Computer Applications, vol. 34, no.4, pp. 1326-1341, 2011.
- K. Schmidt and E. G. Schmidt, “Message Scheduling for the FlexRay Protocol: The Static Segment, “IEEE Transactions on Vehicular Technology, vol. 58, no.5, pp. 2170-2179, 2009. (PDF)
- E. G. Schmidt and K. Schmidt, “Message Scheduling for the FlexRay Protocol: The Dynamic Segment, “IEEE Transactions on Vehicular Technology, vol. 58, no.5, pp. 2160-2169, 2009. (PDF)
- K. Schmidt and E. G. Schmidt, “Systematic Message Schedule Construction for Time-Triggered CAN, “IEEE Transactions on Vehicular Technology, vol.56, no.6, pp.3431-3441, 2007. (PDF)
International Conference:
- Guldiken, C, Schmidt, K.W., Schmidt, E. G., Optimal Telegram Scheduling For The Periodic Phase Of MVB, International Conference & Exhibition on Digital Transformation & Smart Systems, Ankara, Turkey, 2019.
- Akpinar, M., Schmidt, K.W. and Schmidt, E.G., 2019, July. Improved Clock Synchronization Algorithms for the Controller Area Network (CAN). In 2019 28th International Conference on Computer Communication and Networks (ICCCN) (pp. 1-8). IEEE.
- A. Batur, E.G. Schmidt, K.W. Schmidt, “Offset Computation of Response Time Distributions for Messages on the Controller Area Network,” IEEE Symposium on Industrial Embedded Systems, SIES2018.
- M. E. Afşin, K.W. Schmidt, E.G. Schmidt, “C3: Configurable CAN FD Controller: Architecture, Design and Hardware Implementation,” IEEE Symposium on Industrial Embedded Systems, SIES2017.
- A. Batur, E.G. Schmidt, K.W. Schmidt, “Offset Assignment on Controller Area Network: Improved Algorithms and Computational Evaluation,” IEEE Symposium on Industrial Embedded Systems, SIES2017.
- K. Schmidt and E. G. Schmidt, "A Longest-Path Problem for Evaluating the Worst Case Packet Delay of Switched Ethernet," IEEE Symposium on Industrial Embedded Systems, SIES2010.
- E. G. Schmidt, M. Alkan, K. Schmidt, E. Yuruklu, and U. Karakaya, "Performance Evaluation of FlexRay/CAN Networks Interconnected by a Gateway," IEEE Symposium on Industrial Embedded Systems, SIES2010.
- E. G. Schmidt and K. Schmidt, "Schedulability Analysis and Message Schedule Computation for the Dynamic Segment of FlexRay," IEEE VTC Fall 2010.
- K. Schmidt and E. G. Schmidt, "Optimal Message Scheduling for the Static Segment of FlexRay," IEEE VTC Fall 2010.
- K. Schmidt, E. G. Schmidt, A. Demirci, E. Yuruklu , and U. Karakaya, “An Experimental Study of the FlexRay Dynamic Segment,” IFAC Symposium Advances in Automotive Control, IFAC AAC2010.
- K. Schmidt, E. G. Schmidt and J. Zaddach, "A shared-medium communication architecture for distributed discrete event systems," Mediterranean Conference on Control and Automation, 2007.
Recent SIU Conferences:
Controller
Area Network Messages,” IEEE 26. Sinyal İşleme ve İletişim Uygulamaları Kurultayı,
2018.
National Conference (In Turkish):
- U. Karakaya, D. Ç. Karani, B. Alkan, E. G. Schmidt, and K. W. Schmidt, “AUTONET – An Automatic Scheduling Tool for In-Vehicle Networks,” Otomotiv Teknolojileri Kongresi, OTEKON 2014.
- B. Alkan, E. G. Schmidt, and K. W. Schmidt, “Karayollarında Akıllı Ulaşım İçin Araç-içi Haberleşme Ağları,” 1. Karayolu Akıllı Ulaşım Sistemleri Kongre ve Sergisi, 2014.
- A. K. Gözcü, U. Turan, E. G. Schmidt and K. Schmidt, “Dinamik Dağitik Gerçek Zamanli Endüstriyel İletişim Protokolu (D2GEP) Gerçekleştirimi-The implementation of Dynamic Distributed Real time Industrial communication Protocol (D2RIP) ,” IEEE 20. Sinyal İşleme ve İletişim Uygulamaları Kurultayı, 2012.
- Y. B. Kartal, E. G. Schmidt and K. Schmidt, “Paylaşımlı Ethernet Üzerinde Çalışan Özgün Bir Gerçek-zamanlı Haberleşme Protokolü İşçerçevesinin Doğrulanması-The verification of a novel framework for real-time shared medium communication network protocols ,” IEEE 20. Sinyal İşleme ve İletişim Uygulamaları Kurultayı, 2012.
- A. Demirci, E. G. Schmidt, E. Yuruklu, and U. Karakaya, “Flexray Araçiçi Haberleşme Ağlarının Deneysel Başarım Değerlendirmesi – Experimental Evaluation of FlexRay InVehicle Communication Networks,” Otomotiv Teknolojileri Kongresi, OTEKON 2010.
- E. G. Schmidt and K. Schmidt, “FlexRay Protokolu statik bölütü için mesaj çizelgelenmesi-Message Scheduling for the Static Segment of the FlexRay Protocol,” IEEE 16. Sinyal İşleme ve İletişim Uygulamaları Kurultayı, 2008.
- E. G. Schmidt and K. Schmidt, “Dağıtık Ayrık Olaylı Denetleyiciler için Paylaşımlı Ortamda Haberleşme - Shared Medium Communication for Distributed Discrete Event Control,” IEEE 16. Sinyal İşleme ve İletişim Uygulamaları Kurultayı, 2008.
- S. Şenol, K. Leblebicioğlu, E. G. Schmidt, “Zaman Dilimli İletişim Protokolleriyle Haberleşen Ağ Tabanlı Kontrol Sistemleri İçin Mesaj Zamanlama Algoritmaları - Message Scheduling Algorithms For Networked Control Systems With Time Slotted Communication Protocols,” IEEE 16. Sinyal İşleme ve İletişim Uygulamaları Kurultayı, 2008.
- S. Şenol, K. Leblebicioğlu, E. G. Schmidt, “Ağ tabanlı kontrol sistemi için Flexray benzetimi geliştirilmesi-Flexray simulator development for networked control system,” IEEE 15. Sinyal İşleme ve İletişim Uygulamaları Kurultayı, 2007.
Vehicle Connectivity
Talks:
- E.G. Schmidt, "Vehicle Connectivity in Intelligent Transport Systems: Today and Future,” International Automotive Engineerig Conference, IAEC 2017.
- K.W. Schmidt, "Regulations and Testing for Intelligent Vehicles ” International Automotive Engineerig Conference, IAEC 2018.
Recent SIU Conferences:
- Ç. Bağcı, E.G. Schmidt, “Akıllı Ulaşım Uygulamaları İçin Bir Haberleşme Mimarisi - A Communication Architecture for Intelligent Transportation Applications,” IEEE 25. Sinyal İşleme ve İletişim Uygulamaları Kurultayı, 2017.
Autonomous Vehicles
International Journal:
- Al-Jhayyish, A. M. H., Schmidt, K.W: Feedforward Strategies for Cooperative Adaptive Cruise Control in Heterogeneous Vehicle Strings, IEEE Transactions on Intelligent Transportation Systems, Special Issue on "Applications and Systems for Collaborative Driving", vol. 19, no. 1, pp. 113-122, 2018.
- Saglam, H.B., Schmidt, K.W: Outputs bounds for linear systems with repeated input signals: existence, computation and application to vehicle platooning, Turkish Journal of Electrical Engineering & Computer Sciences, vol. 26, pp. 283-293, 2018.
Conference:
- Hilal Bingol and Schmidt, K.W., 2020, April. Trajectory Generation for Vehicle Platoons with Input and State Constraints. In 28th Signal Processing and Communications Applications Conference (SIU) (accepted). IEEE.
- Yasin Yeniaydin and Schmidt, K.W., 2020, April. Lane Detection based on Best Pairs of Lane Markings: Method and Evaluation. In 28th Signal Processing and Communications Applications Conference (SIU) (accepted). IEEE.
- Yeniaydin, Y., Schmidt, K.W., Comparison of 2D LIDAR Data Segmentation Methods Based on Synthetic Data Generation, International Conference & Exhibition on Digital Transformation & Smart Systems, Ankara, Turkey, 2019.
- Al-Dahhan, M. R. H., Schmidt, K.W., Path Planning Based on Voronoi Diagram and PRM for Omnidirectinal Mobile Robots, International Conference & Exhibition on Digital Transformation & Smart Systems, Ankara, Turkey, 2019.
- Yeniaydin, Y. and Schmidt, K.W., 2019, April. Sensor Fusion of a Camera and 2D LIDAR for Lane Detection. In 2019 27th Signal Processing and Communications Applications Conference (SIU) (pp. 1-4). IEEE.
- Yeniaydin, Y., Schmidt, K.W., “Robust Lane Recognition Based on Arc Splines,” International Conference & Exhibition on DIGITAL TRANSFORMATION & SMART SYSTEMS, (DTSS). 2018.
- Saracoglu, K., Ules, B., Schmidt, K.W., “A Lane Keeping System with a Weighted Preview Measurement,” IEEE 26. Sinyal Isleme ve Iletisim Uygulamalari Kurultayi (SIU), 2018.
- Yeniaydin, Y., Schmidt, K.W., “A Lane Detection Algorithm Based on Reliable Lane Markings,” IEEE 26. Sinyal Isleme ve Iletisim Uygulamalari Kurultayi (SIU), 2018.
- Schmidt, K.W.: Cooperative Adaptive Cruise Control for Vehicle Following During Lane Changes, IFAC World Congress, Toulouse, France, 2017.
- Atagoziyev, M., Schmidt, K.W., Schmidt, K.W.: Lane Change Scheduling for Autonomous Vehicles, 14th IFAC Symposium on Control in Transportation Systems, Istanbul Turkey, 2016.
- Bingöl H., Cankaya E., Schmidt, K.W.: String Stable Cooperative Adaptive Cruise Control under Actuator Saturation (in Turkish), National Conference of the Turkish National Committee of Automatic Control, Denizli, Turkey, 2015.
- Al-Jhayyish, A. M. H., Schmidt, K.W.: Cooperative Adaptive Cruise Control Design for Heterogeneous Vehicle Strings, Engineering and Technology Symposium, Ankara, Turkey, 2015.
- Deaibil, I. B. A., Schmidt, K.W.: Performing Safe and Efficient Lane Changes in Dense Vehicle Traffic, Engineering and Technology Symposium, Ankara, Turkey, 2015.
National Journal:
- Al-Dahhan, M.R.H. and Schmidt, K.W., Safe and Efficient Path Planning for Omni-directional Robots using an Inflated Voronoi Boundary. Çankaya Üniversitesi Bilim ve Mühendislik Dergisi, 16(2), pp.46-69.
- Kahya, A.H.M.A. and Schmidt, K.W., 2017. Clothoid-based lane change trajectory computation for self-driving vehicles. Çankaya Üniversitesi Bilim ve Mühendislik Dergisi, 14(2).
- Schmidt, K.W: String Stable Cooperative Adaptive Cruise Control Under Actuator Saturation, Pamukkale University Journal of Engineering Sciences, 2016.
Supervised Theses
In-Vehicle and Embedded Networks
- Scheduling for the Periodic Phase of the Multifunction Vehicle Bus
Mustafa Çağlar Güldiken, M.S. Thesis, Defense date: January 2020, Co-advised with Prof. Dr. Ece Güran Schmidt
- Clock Synchronization Algorithms on a Software-defined CAN Controller: Implementation and Evaluation
Serkan Yalçın, M.S. Thesis, Defense date: January 2020, Co-advised with Prof. Dr. Ece Güran Schmidt
- C³: Configurable CAN FD Controller: Design,
Implementation and Evaluation
Mehmet Ertuğ Afşin, M.S. Thesis, Defense date: February 2018, Co-advised with Associate Prof. Dr. Klaus Werner Schmidt Thesis overview
-
Controller Area Network with Offset Scheduling:
Improved Offset Assignment Algorithms And
Computation Of Response Time Distributions
Ahmet Batur, M.S. Thesis, Defense date: February 2018, Co-advised with Associate Prof. Dr. Klaus Werner Schmidt Thesis overview
-
Efficient
algorithms for the frame packing and slot allocation of FlexRay v3.0
Cumhur Çakmak, M.S. Thesis, Defense date: February 2017, Co-advised with Associate Prof. Dr. Klaus Werner Schmidt Thesis overview
-
Message Scheduling For The Static and Dynamic Segment of Flexray: Algorithms and Applications
Özgur Kızılay, M.S. Thesis, Defense date: December 2015, Co-advised with Associate Prof. Dr. Klaus Werner Schmidt Thesis overview
-
Controller Area
Network (CAN) Response Time Analysis and Scheduling For Advanced Topics:
Offsets, FIFO Queues and Gateways
Thesis overview
Burak Alkan, M.S. Thesis, Defense date: February 2015, Co-advised with Associate Prof. Dr. Klaus Werner Schmidt
-
A Frame Packing
Method to Improve the Schedulability on CAN and CAN-FD
Thesis overview
Gökhan Urul, M.S. Thesis, Defense date: February 2015, Co-advised with Associate Prof. Dr. Klaus Werner Schmidt
-
RSAR: A Layered
Software Architecture for Cyber-physical Systems
Erhan Akagündüz, M.S. Thesis, Defense date: February 2015, Co-advised with Associate Prof. Dr. Halit Oğuztüzün
-
UNIBUS: A
Universal Hardware Architecture For Serial Bus Interfaces With Real-Time Support
Thesis overview
Mehdi Duman, M.S. Thesis, Defense date: January 2015
-
Dependability Design for Distributed Real-Time Systems
with Broadcast Communication
Thesis overview
Yusuf Bora Kartal, Ph.D. Thesis, Defense date: June 2014
- An FPGA implementation of two-step trajectory
planning for automatic parking
Thesis overview
Halil Ertuğrul, M.S. Thesis, Defense date: September 2013, Co-advised with Associate Prof. Dr. Klaus Werner Schmidt
- Implementation and evaluation of the dependability
plane for the Dynamic Distributed Dependable Real Time
Industrial Protocol (D3RIP)
Thesis overview
Ömer Berat Sezer, M.S. Thesis, Defense date: September 2013, Co-advised with Associate Prof. Dr. Klaus Werner Schmidt
- Implementation and evaluation of the Dynamic
Distributed Real Time Industrial Protocol (D2RIP)
Thesis overview
Adem Kaya, M.S. Thesis, Defense date: September 2013, Co-advised with Associate Prof. Dr. Klaus Werner Schmidt
- The development and hardware implementation of a
dynamically reconfigurable and area optimized Cyclic
Redundancy Check architecture
Thesis overview
Özcan Yurt, M.S. Thesis, Defense date: August 2013
- Software tool development for the automated
configuration of FlexRay networks for in-vehicle
communication
Thesis overview
Can Öztürk, M.S. Thesis, Defense date: January 2013, Co-advised with Associate Prof. Dr. Klaus Werner Schmidt
- A software tool for vehicle calibration, diagnosis
and test via controller area network
Thesis overview
Utku Civelek, M.S. Thesis, Defense date: September 2012
- QoC and QoS bargaining for message scheduling in
networked control systems
Sinan Şenol, Ph.D. Thesis, Defense date: June 2012, Co-advised with Prof. Dr. Kemal Leblebicioğlu
- Development of strategies for reducing the
worst-case message response times on the controller area
network
Vakkas Çelik, M.S. Thesis, Defense date: January 2012, Co-advised with Assistant Prof. Dr. Klaus Werner Schmidt
- Simulation and performance evaluation of a
distributed real-time communication protocol for
industrial embedded systems
Güray Aybar, M.S. Thesis, Defense date: December 2011
- Implementation and evaluation of a eynchronous
time-slotted medium access protocol for networked
industrial embedded systems
Ahmet Korhan Gözcü, M.S. Thesis, Defense date: September 2011
- Implementing and evaluating the Coordination Layer
and time-synchronization of a new protocol for
industrial communication networks
Ulaş Turan, M.S. Thesis, Defense date: September 2011
- Ethernet based real time communications for
embedded systems
Ozan Yılmaz, M.S. Thesis, Defense date: May 2010
- Inter-connected FlexRay and CAN Networks for
ın-vehicle communication: Gateway implementation and
end-to-end performance study
Melih Alkan, M.S. Thesis, Defense date: May 2010
- Performance evaluation of FlexRay networks for
in-vehicle communication
Ali Demirci, M.S. Thesis, Defense date: November 2009
- Time-triggered controller area network (TTCAN)
communication scheduling: a systematic approach
Uğur Keskin, M.S. Thesis, Defense date: August 2008
- Testing distributed real-time systems with a
distributed test approach
Gökhan Öztaş, M.S. Thesis, Defense date: May 2008
Vehicle Connectivity
-
An End-To-End Communication Architecture for
Intelligent Transportation Systems: Design,
Implementation and Latency Analysis
Çağatay Bağcı, M.S. Thesis, Defense date: February 2018 Thesis overview
-
A Generic and Extendable System Architecture for Intelligent Transportation Systems
Thesis overview
Kaan Çetinkaya, M.S. Thesis, Defense date: January 2015
Autonomous Vehicles
Mohammed Rabeea Hashim Al-Dahhan, PhD Thesis, Defense date: February 2020
Yasin Yeniaydın, M.S. Thesis, Defense date: August 2019
Harun Buğra Sağlam, PhD Thesis, Defense date: September 2017
Ardam H.M. Ali, PhD Thesis, Defense date: September 2017.
Hilal Bingöl, M.S. Thesis, Defense date: May 2017
Erkam Çankaya, M.S. Thesis, Defense date: May 2017
Ahmed M.H. Al-Jhayyish, M.S. Thesis, Defense date: January 2016
Inas Deaibil, M.S. Thesis, Defense date: May 2015
Contact
Lab: A-401
Phone: +90 (312) 2102339
Fax: +90 (312) 2102304
e-mail: eguran[at]metu.edu.tr, schmidt[at]metu.edu.tr
© 2018 Ece Güran Schmidt. All rights reserved.
Page Design: Prologue 1.1 by
HTML5 UP